Next: Underdamping: Up: Simple Harmonic Motion Previous: Torsional oscillations
We know that in reality, a spring won't oscillate for ever. Frictional forces will diminish the amplitude of oscillation until eventually the system is at rest.
We will now add frictional forces to the mass and spring. Imagine that the mass was put in a liquid like molasses. Your lab instructor will not like it when they see their nice metal weight coated with a thick layer of ants in the morning. Be that as it may, when the mass is inside the molasses, it'll hardly oscillate at all.
On the other hand, a mass in air oscillates many times before
it comes to rest. To incorporate friction, we can just say that
there is a frictional force that's proportional to the velocity
of the mass. This is a pretty good approximation for a body
moving at a low velocity in air, or in a liquid.
So we say the frictional force ![]() . The constant
. The constant
![]() depends on the kind of liquid the mass is in and the
shape of the mass. The negative sign, just says that the
force is in the opposite direction to the body's motion.
Let's add this frictional force in to the equation
depends on the kind of liquid the mass is in and the
shape of the mass. The negative sign, just says that the
force is in the opposite direction to the body's motion.
Let's add this frictional force in to the equation
![]()
| (1.59) |
This is a differential equations. We'll solve it using the guess we made in section 1.1.6.
But before diving into the math, what you expect is that the
amplitude of oscillation decays with time. Let's say you
have a spring oscillating pretty quickly, say ![]() . If at
. If at ![]() ,
the amplitude was
,
the amplitude was ![]() , then suppose at
, then suppose at
![]() the amplitude
is half that,
the amplitude
is half that, ![]() . What happens after another minute, at
. What happens after another minute, at ![]() ?
Well we expect
that it should halve again, and be
?
Well we expect
that it should halve again, and be ![]() . After another
minute
. After another
minute ![]() it should halve again. This is describes
an exponential decay of the amplitude. Instead of the amplitude
being constant, it's decaying with time.
it should halve again. This is describes
an exponential decay of the amplitude. Instead of the amplitude
being constant, it's decaying with time.
| (1.61) |
| (1.62) |
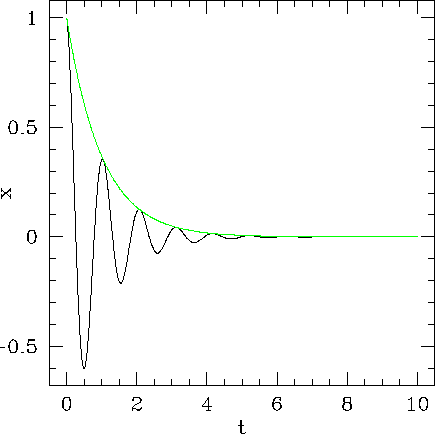
Here's a plot of of an example of such a function
![]()
The green line is
![]() . It is the envelope of the oscillation. Obviously
depending on the rate of decay of the amplitude, and the frequency, you'll get
a different picture. But qualitatively you'll see an oscillating function whose
amplitude decays away to zero. This should describe weak damping. We don't
expect this to work too well in molasses. To get a more quantitative
understanding we'll have to do some more math.
. It is the envelope of the oscillation. Obviously
depending on the rate of decay of the amplitude, and the frequency, you'll get
a different picture. But qualitatively you'll see an oscillating function whose
amplitude decays away to zero. This should describe weak damping. We don't
expect this to work too well in molasses. To get a more quantitative
understanding we'll have to do some more math.
We'll try sticking
![]() into eqn. 1.60.
Here again,
into eqn. 1.60.
Here again, ![]() is just a constant.
We already differentiated
this function before in eqns. 1.24 and
1.25 so we don't have to do it again. So we have
is just a constant.
We already differentiated
this function before in eqns. 1.24 and
1.25 so we don't have to do it again. So we have
| (1.63) |
| (1.64) |
| (1.65) |
If the damping, ![]() , is large, then the square root is real.
However if
, is large, then the square root is real.
However if ![]() , then it becomes imaginary.
, then it becomes imaginary.